The BBC Micro is the machine that really got me into computing. It was designed by Acorn in a tearing hurry for the BBC Computer Literacy Project in 1981 – see the film Micro Men for a great dramatization of the story. Because it was done in such a rush, some things weren’t quite finished for the early machines. One of those things was the power supply.
Why is the power supply interesting? Well, later BBC Micros had a perfectly normal, reliable switch-mode power supply, not dissimilar to the one in a modern PC. But early ones had a linear power supply, which gained a fearsome reputation for overheating, exploding, and being incompatible with nearly everything. I recently dragged an early, Issue 2, BBC Micro out of the loft and realised it contained this elusive beast, the linear power supply. I thought I’d see what all the fuss was about.
First things first: does it work? Well, yes. Despite not having been switched on for probably 20 years, it powered up absolutely fine. Boop-beep. No smoke or flames. Good. Time to see what’s inside.

This particular machine started life as a model A, with just 16K of RAM and very little else. However, it got upgraded at some point into a model B, with the full complement of RAM, and has an unusual Opus double-density disc interface in it as well as a couple of extra ROMs including Wordwise, the word processor. That’s the sort of thing that’s supposed to be impossible with a linear power supply. You can see the black box on the left – later power supplies are a gold colour. Here are a couple of closeups of its labels:


I took it out and examined it. The first thing I noticed was that it doesn’t really fit very well: there are some odd washers sandwiched between the power supply and the case, and they’ve used nylon screws to fit it, for some reason.

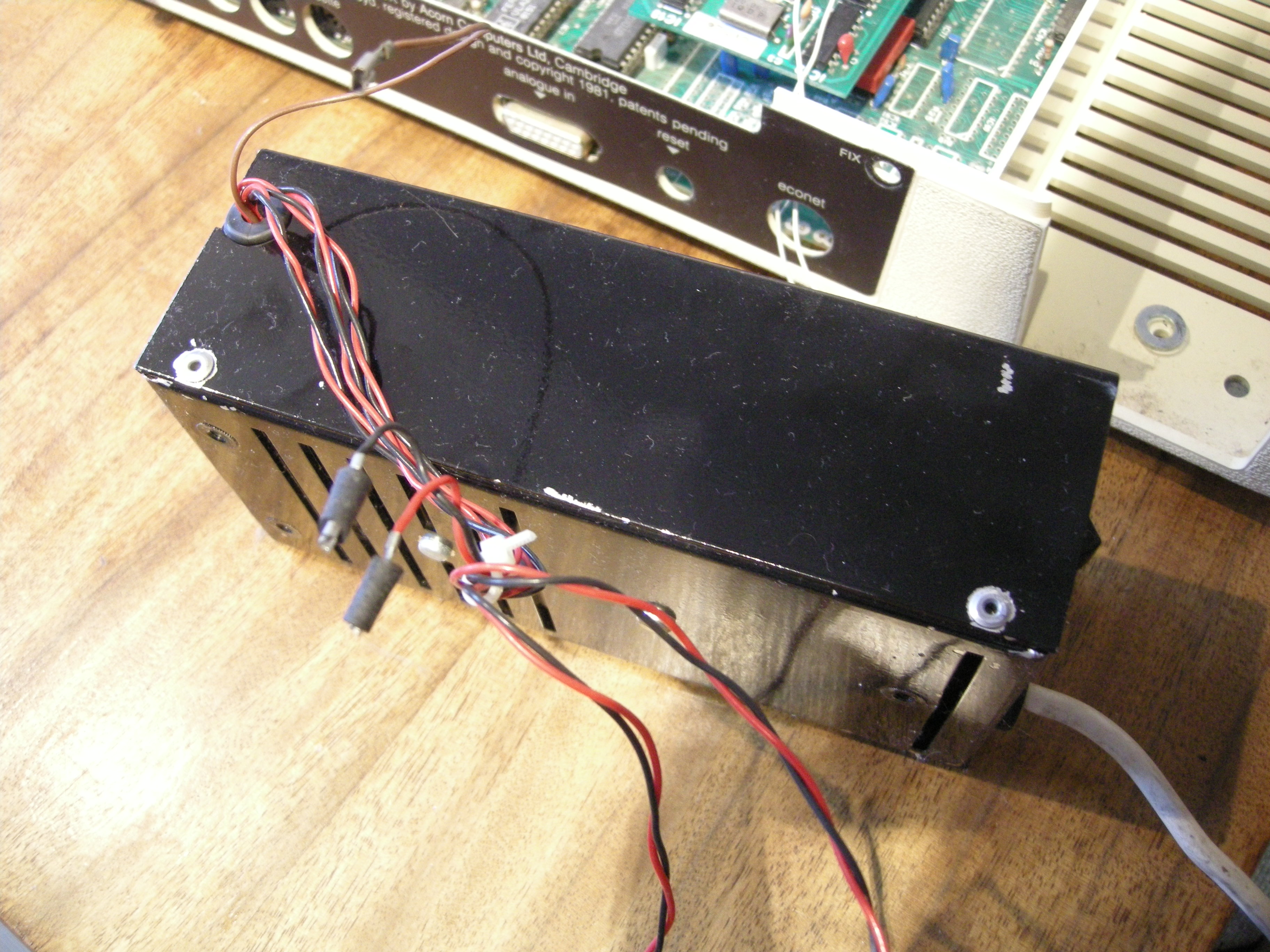
You can probably see from the side view that it’s riveted together. The rivets were quickly dealt with, revealing the insides:
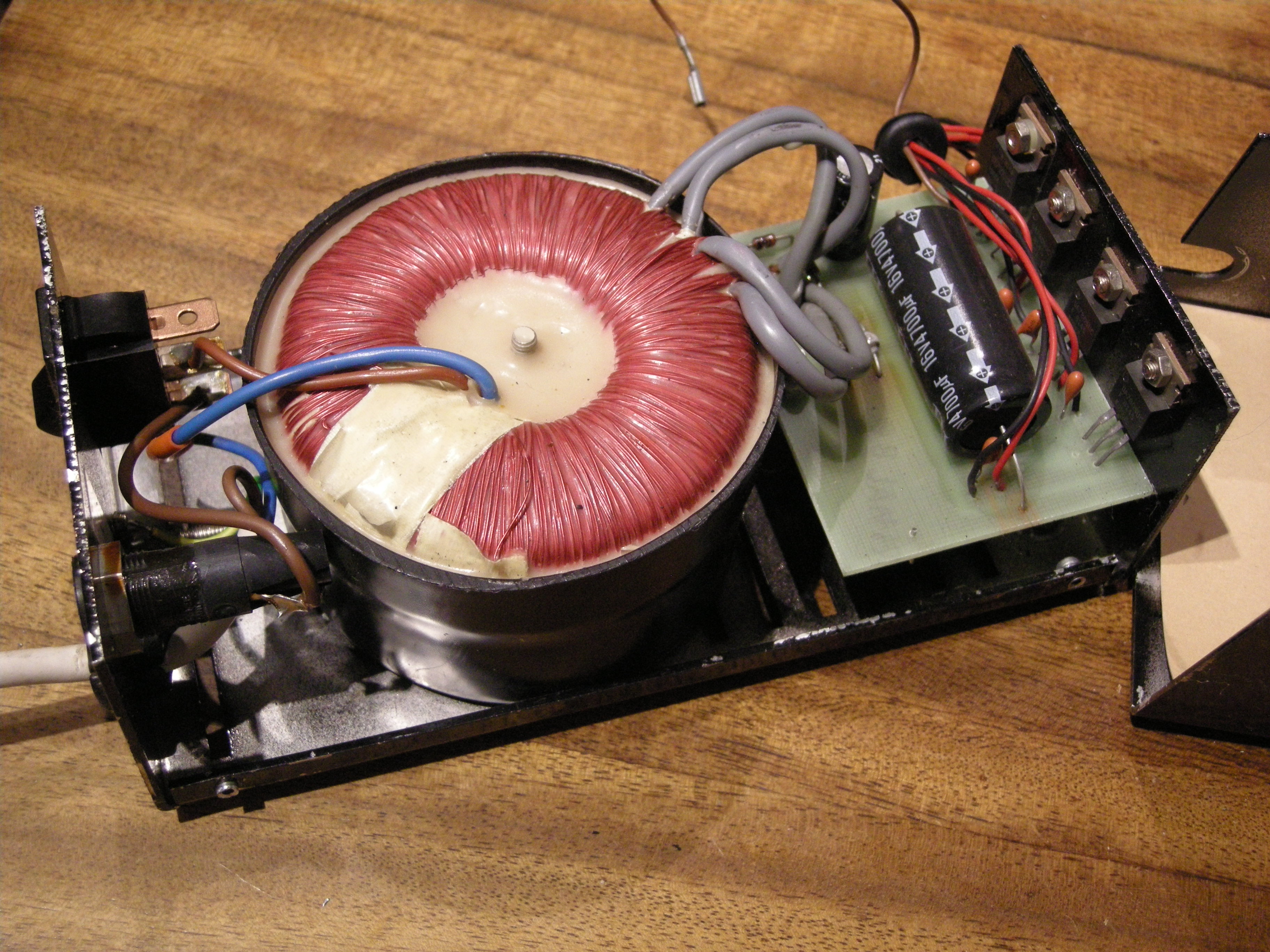
Pretty straightforward stuff: a toroidal transformer, rectifier and smoothing, and a row of regulators. Here are closeups of the circuit board and regulators. Note the little orange tantalum capacitors. I suspect that’s where the reputation for explosions has come from: when used like this, they do tend to fail short-circuit and go off like little fireworks from time to time. These ones, however, are rated at 35V, so with only 5V or 12V across them they should be fairly reliable.


It didn’t take long to trace out the circuit.

What is interesting is the way the 2.25A output at 5V is achieved. Rather than use one big regulator, they’ve chosen to use three 7805s, rated at 1A each. Three sets of wires leave the power supply and are delivered to three places on the Beeb’s motherboard. There is no connection between the three 5V rails on the motherboard according to my meter. They’re entirely independent. This is good, because it means that the three 7805s won’t end up fighting each other if their output voltages are slightly different.
I took a few measurements while the machine was running. The voltage on the 4700uF smoothing capacitors was 10.5V. The currents delivered by each output were:
VCC1: 0.49A
VCC2: 0.75A
VCC3: 0.84A
-5V: 15mA
I tried removing the disc interface to see what difference that made to the power consumption. It reduced VCC1 to 0.35A and had no other effect.
The total current flowing at 5V is just over 2A, which is sailing fairly close to the wind given that the power supply is only rated at 2.25A. However, nothing in the power supply is under great stress, and I see no reason why it should fail unexpectedly. Unlike a switch-mode supply, it would also be easy to repair. If it was going to be used for a long time, I’d be very tempted to replace the 1uF tantalum capacitors with modern ceramic or electrolytic ones, just because the tantalums do tend to commit suicide randomly with old age.
These machines are now becoming collectable, and early ones like this are worth preserving in their own right. If you’ve got an early Beeb, there’s no reason to fear the linear power supply and replace it. It’s part of the story, and it’s possible to keep it going more or less indefinitely.